11장: 구름 운동, 돌림힘, 각운동량
Rolling, Torque, and Angular Momentum
이번 장에서 배울 내용
- 구름 운동(rolling): 병진 + 회전의 결합
- 구름 운동의 에너지 와 빗면 위의 구름 운동
- 돌림힘 벡터(torque vector): τ=r×F
- 각운동량(angular momentum): ℓ=r×p, L=Iω
- 각운동량 보존: 피겨 스케이팅, 다이빙
- 세차운동(precession): 자이로스코프
11.1 구름 운동
구름 = 병진 + 회전
자전거 바퀴, 볼링공, 축구공 — 일상에서 흔히 보는 운동이다.
구름 운동(rolling) 은 순수 병진(translation) 과 순수 회전(rotation) 의 결합이다.

굴림은 병진과 회전의 결합
굴러가는 물체는 질량중심의 병진 운동과 자체 회전 운동을 동시에 가진다.
구름 조건
미끄러짐 없는 구름 운동의 핵심 조건:
vcom=ωR
여기서 vcom은 질량 중심의 속력, ω는 각속력, R은 반지름이다.
물리적 의미: 접촉점의 속도가 0이다!
- 접촉점 (바닥): vcom−ωR=0
- 꼭대기: vcom+ωR=2vcom
양변을 시간 미분하면 가속도 관계도 얻는다:
acom=αR
구름 운동의 운동에너지
구름 운동의 전체 운동에너지:
K=21Icomω2+21Mvcom2
- 첫째 항: 회전 운동에너지 (질량 중심 둘레의 회전)
- 둘째 항: 병진 운동에너지 (질량 중심의 이동)
vcom=ωR을 대입하면:
K=21IcomR2vcom2+21Mvcom2=21(R2Icom+M)vcom2
11.2 빗면 위의 구름 운동
자유 물체 다이어그램

빗면 아래로 구르는 물체에 작용하는 힘: 중력 Mg, 수직항력 N, 정지 마찰력 fs
운동 방정식
빗면 방향 (x축):
Mgsinθ−fs=Macom
회전 (질량 중심에 대한 돌림힘):
Rfs=Icomα
구름 조건 acom=αR을 사용하면:
fs=R2Icomacom
대입하면:
Mgsinθ−R2Icomacom=Macom
빗면 가속도
acom=1+Icom/MR2gsinθ
c=Icom/MR2으로 놓으면:
acom=1+cgsinθ
| 물체 | Icom | c | acom |
|---|---|---|---|
| 속이 빈 원통 (링) | MR2 | 1 | 21gsinθ |
| 속이 찬 원판 | 21MR2 | 21 | 32gsinθ |
| 속이 찬 구 | 52MR2 | 52 | 75gsinθ |
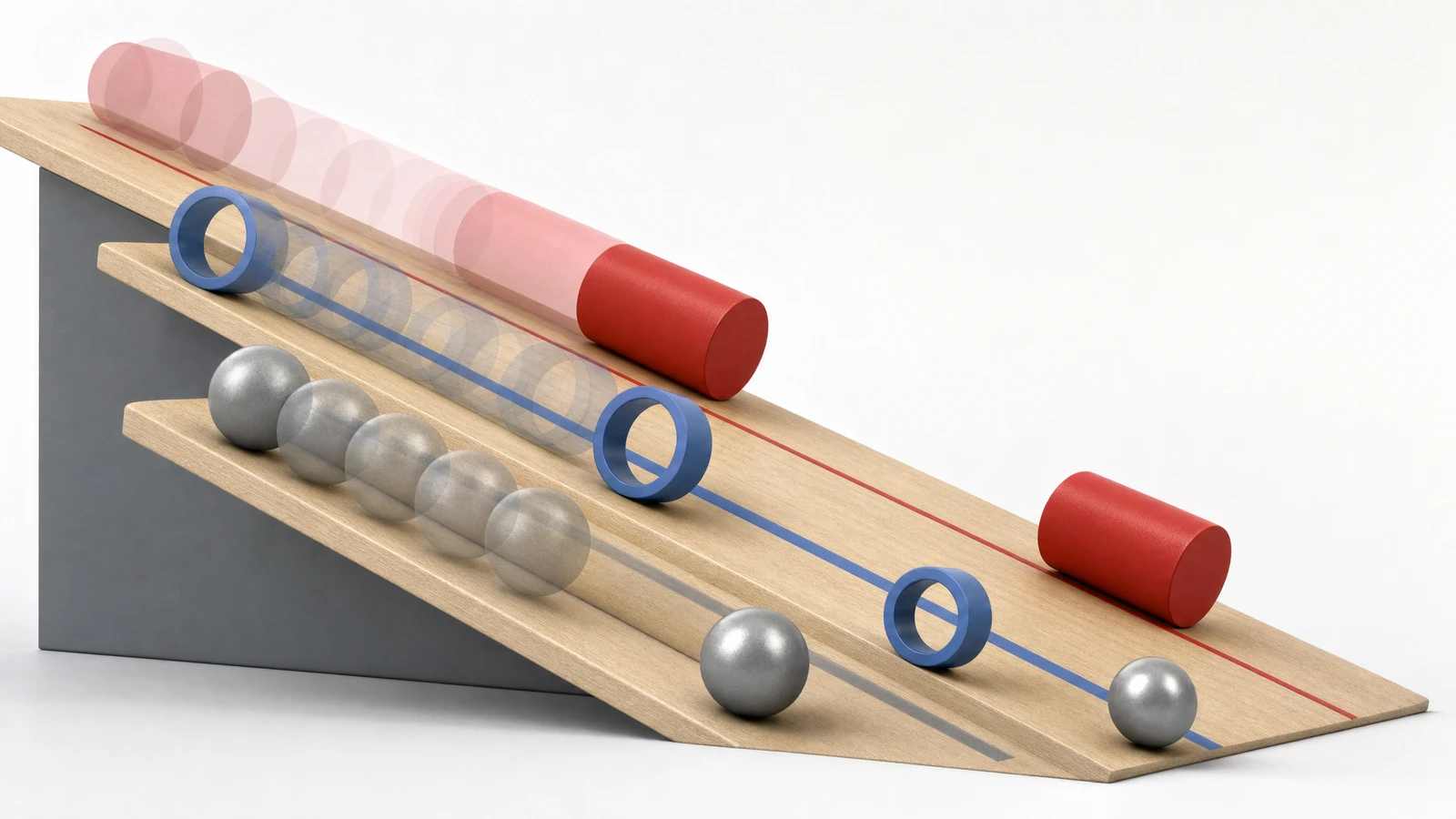
누가 먼저 도착할까?
c가 작을수록 (관성 모멘트가 작을수록) 가속도가 크다.
순서: 구 > 원판 > 링 (구가 가장 빨리 도착!)
핵심: 질량과 반지름에 무관 — 오직 질량 분포(관성 모멘트의 형태)만 중요하다.
구가 가장 빠른 이유: 회전에 소비하는 에너지 비율이 가장 작기 때문이다.
구름 운동 경주 시뮬레이션
요요(Yo-yo)
요요는 빗면 위의 구름 운동의 특수한 경우로 이해할 수 있다.

요요에 작용하는 힘: 중력 Mg (아래)와 실의 장력 T (위)
핵심: 실이 감긴 축의 반지름 R0 이 구름 조건에서 R 역할을 한다.
요요의 운동 방정식
1단계: 병진 운동 (아래 방향을 양의 방향으로)
Mg−T=Macom
2단계: 회전 운동 (질량 중심 축에 대해)
실이 축 반지름 R0에 감겨 있으므로, 장력 T가 만드는 돌림힘:
TR0=Icomα
3단계: 구름 조건
실이 풀리면서 요요가 회전하므로:
acom=αR0
요요의 가속도 유도
회전 방정식과 구름 조건에서 T를 구하면:
T=R0Icomα=R02Icomacom
이것을 병진 방정식에 대입:
Mg−R02Icomacom=Macom
Mg=acom(M+R02Icom)
acom=1+Icom/MR02g
빗면 공식에서 θ=90° (sin90°=1), R→R0으로 놓은 것과 정확히 같다!
요요의 장력과 물리적 의미
실의 장력:
T=Mg−Macom=Mg(1−1+Icom/MR021)=1+MR02/IcomMg
균일한 원판 요요 (Icom=21MR2)의 경우:
acom=1+R2/2R02g=2R02+R22gR02
축 반지름 R0이 외반지름 R보다 훨씬 작으면 (R0≪R):
acom≈R22gR02≪g
요요가 천천히 내려오는 이유: 작은 R0로 인해 Icom/MR02이 매우 커지기 때문이다. 회전 관성이 병진 운동을 크게 저항한다!
11.3 돌림힘 벡터
벡터곱 복습
돌림힘을 벡터로 정의하려면 벡터곱(cross product) 이 필요하다.
c=a×b
- 크기: ∣c∣=absinϕ (ϕ는 a와 b 사이의 각)
- 방향: 오른손 법칙 — a에서 b로 감아쥐면 엄지 방향
성질:
- a×b=−b×a (교환 불가!)
- a×a=0
돌림힘의 벡터 정의

원점 O에서 힘의 작용점까지의 위치 벡터가 r이고, 힘이 F일 때:
τ=r×F
크기: ∣τ∣=rFsinϕ
돌림힘의 의미
τ=rFsinϕ=r⊥F=rF⊥
- r⊥=rsinϕ: 모멘트 팔(moment arm) — 회전축에서 힘의 작용선까지의 수직 거리
- F⊥=Fsinϕ: 회전을 일으키는 힘의 접선 성분
돌림힘은 회전 운동의 원인 이다 — 힘이 병진 운동의 원인인 것처럼.
11.4 각운동량
입자의 각운동량

원점 O에 대한 입자의 각운동량(angular momentum) :
ℓ=r×p=r×mv
각운동량의 크기
ℓ=rmvsinϕ=r⊥mv=rmv⊥
- ϕ는 r과 v 사이의 각도
- r⊥=rsinϕ: 직선 운동 경로까지의 수직 거리
단위: kg⋅m2/s
원운동하는 입자의 경우 (ϕ=90°):
ℓ=rmv=mr2ω
회전의 뉴턴 제2법칙
병진: Fnet=dtdp
이와 유사하게, 회전 에서:
τnet=dtdℓ
입자에 작용하는 알짜 돌림힘 = 각운동량의 시간 변화율
증명: ℓ=r×p를 시간 미분하면
dtdℓ=dtdr×p+r×dtdp=v×mv+r×F=0+τ=τ
강체의 각운동량
고정축을 중심으로 회전하는 강체의 각운동량:
L=i∑ℓi=i∑miri2ω=Iω
L=Iω
회전의 뉴턴 제2법칙 (강체):
τnet=dtdL=Iα
이것은 10장에서 배운 τnet=Iα와 같다!
11.5 각운동량 보존
보존 법칙
만약 계에 작용하는 알짜 외부 돌림힘이 0 이면:
τnet, ext=dtdL=0
따라서:
L=Iω=일정
Iiωi=Ifωf
이것은 선운동량 보존 (Fnet=0⇒p=const)의 회전 버전이다.
질량 분포가 바뀌면 각속도가 바뀐다

외부 토크가 작으면 관성모멘트와 각속도가 서로 보상되어 각운동량을 보존한다.
피겨 스케이팅: 각운동량 보존의 대표적 예

김연아 선수의 스핀을 떠올려 보자:
- 팔을 벌린 상태: I 크고 → ω 작음 (느린 회전)
- 팔을 모은 상태: I 작고 → ω 큼 (빠른 회전)
외부 돌림힘이 거의 없으므로 L=Iω가 보존된다!
다이빙과 체조
다이빙 선수가 공중에서 몸을 웅크리면:
- 관성 모멘트 I가 감소
- 각속력 ω가 증가 → 빠르게 회전
- 입수 전에 몸을 펴면 → I 증가, ω 감소 → 안정적 입수
핵심: 외부 돌림힘 없이도 자신의 몸 형태를 바꿔서 회전 속도를 조절할 수 있다.
같은 원리가 우주 공간에서 위성의 자세 제어에도 사용된다 (반작용 바퀴, reaction wheel).
각운동량 보존 시뮬레이션
예제: 회전하는 학생
질량 M=5.0 kg, 반지름 R=0.50 m인 회전 원판 위에 학생이 서 있다. 양손에 각각 m=2.0 kg의 아령을 들고 ri=0.80 m에서 팔을 벌린 채 ωi=3.0 rad/s로 회전 중이다.
팔을 모아 rf=0.20 m으로 줄이면 ωf는?
Ii=21MR2+2mri2=21(5.0)(0.50)2+2(2.0)(0.80)2=3.185kg⋅m2
If=21MR2+2mrf2=21(5.0)(0.50)2+2(2.0)(0.20)2=0.785kg⋅m2
ωf=IfIiωi=0.7853.185(3.0)=12.2 rad/s
관성 모멘트가 약 4배 줄면, 각속력은 약 4배 증가!
11.6 세차운동
자이로스코프의 세차운동

빠르게 회전하는 팽이가 쓰러지지 않고 빙글빙글 도는 현상 — 세차운동(precession) 이다.
회전하지 않는 팽이는 즉시 쓰러진다. 빠르게 회전하면 왜 쓰러지지 않을까?
자이로스코프의 느린 방향 변화

빠르게 자전하는 물체는 중력 토크에 의해 넘어지기보다 각운동량 방향이 천천히 돈다.
1단계: 자전하는 바퀴의 각운동량
바퀴가 각속도 ω로 자전하고 있으면:
L=Iω
L은 회전축 방향(수평)을 가리킨다. 크기는 L=Iω.
지지점에서 질량 중심까지의 거리를 r이라 하자.
2단계: 중력에 의한 돌림힘
지지점을 기준으로 한 중력의 돌림힘:
τ=r×Mg
- r: 수평 방향 (지지점 → 질량 중심)
- Mg: 아래 방향
오른손 법칙 적용:
- 크기: τ=Mgr
- 방향: 수평면 위에서 L에 수직
핵심: τ⊥L — 돌림힘과 각운동량이 서로 수직이다!
3단계: 각운동량의 방향 변화
뉴턴 제2법칙의 회전 버전:
dL=τdt
τ가 L에 수직이므로, dL도 L에 수직이다.
벡터에 수직인 미소 변화를 더하면 → 크기는 변하지 않고 방향만 변한다
이것은 원운동에서 구심 가속도가 속력은 유지하면서 방향만 바꾸는 것과 같은 원리!
결과: L의 끝이 수평면 위에서 원을 그리며 회전한다 → 이것이 세차운동이다.
4단계: 세차 각속도 유도

시간 dt 동안 L이 수평면에서 dϕ만큼 회전했다고 하자.
L의 끝이 그리는 원호의 길이 (작은 각도 근사):
∣dL∣=Ldϕ
한편 ∣dL∣=τdt=Mgrdt이므로:
Ldϕ=Mgrdt
세차 각속도 Ω=dtdϕ를 구하면:
Ω=LMgr=IωMgr
세차운동의 의미
Ω=IωMgr
- ω 증가 → Ω 감소: 빠르게 돌수록 세차가 느려진다
- ω 감소 → Ω 증가: 느려지면 세차가 빨라지다가 결국 쓰러진다
- M 또는 r 증가 → 돌림힘 증가 → 세차가 빨라진다
팽이: 마찰로 ω가 줄면 Ω가 커지다가 결국 쓰러진다
자전거 바퀴: 빠르게 돌 때 세차 효과로 안정적 — 넘어지기 어렵다
주의: 위 공식은 ω≫Ω (자전이 세차보다 훨씬 빠를 때)의 근사이다. 이 조건이 깨지면 장동(nutation) 등 더 복잡한 운동이 나타난다.
Review & Summary
핵심 개념
| 개념 | 공식 |
|---|---|
| 구름 조건 | vcom=ωR |
| 구름 운동에너지 | K=21Icomω2+21Mvcom2 |
| 빗면 가속도 | acom=1+Icom/MR2gsinθ |
| 돌림힘 벡터 | τ=r×F |
| 각운동량 (입자) | ℓ=r×p |
| 각운동량 (강체) | L=Iω |
핵심 개념 (계속)
| 개념 | 공식 |
|---|---|
| 회전의 뉴턴 2법칙 | τnet=dtdL |
| 각운동량 보존 | Iiωi=Ifωf (외부 돌림힘 = 0) |
| 세차 각속도 | Ω=IωMgr |
기억할 것:
- 구름 운동은 병진 + 회전 의 조합이다
- 빗면 경주에서 질량 분포 가 중요하다 (질량·반지름은 무관)
- 각운동량은 보존량 이다 (외부 돌림힘이 없을 때)
- 돌림힘은 L의 방향 을 바꿀 수 있다 (세차운동)